
Por su proyecto “Transferencia de aprendizaje usando redes de hidrocarburos artificiales: un caso de estudio en robótica”, mediante el cual busca que computadoras, robots, celulares y todo elemento con inteligencia artificial sea capaz de transferir conocimiento a otras máquinas similares, el joven doctor Hiram Eredín Ponce Espinosa recibió el Premio Google a la Investigación, mismo que le valdrá financiamiento por un año para llevar a cabo su trabajo.
En entrevista exclusiva para la Agencia Informativa Conacyt, Ponce Espinosa, quien se desempeña como profesor investigador en la Facultad de Ingeniería de la Universidad Panamericana (UP), explicó que el premio de alcance latinoamericano tiene como objetivo apoyar solo aquellas propuestas de proyectos de investigación que apunten al desarrollo de tecnología de frontera en el área de computación.
Ante ello, su propuesta fue una de las 27 seleccionadas —tres mexicanas— de un aproximado de 280 trabajos que Google recibió tras lanzar la convocatoria. “Para mí, este reconocimiento es muy importante, me siento muy orgulloso de obtener un premio donde mi proyecto resultó seleccionado de entre cientos de propuestas; al mismo tiempo, significa también mucha responsabilidad en cuanto al trabajo que hay que realizar y por la formación de estudiantes que implicará”.
¿CÓMO SE LOGRARÁ LA TRANSFERENCIA DE APRENDIZAJE?
Sobre el trabajo que realizará durante el año que dura el financiamiento de Google, el joven candidato al Sistema Nacional de Investigadores (SNI) detalló que la base de este tiene lugar en una técnica denominada redes de hidrocarburos artificiales que él mismo propuso durante su tesis doctoral y que ya documentó en artículos científicos.
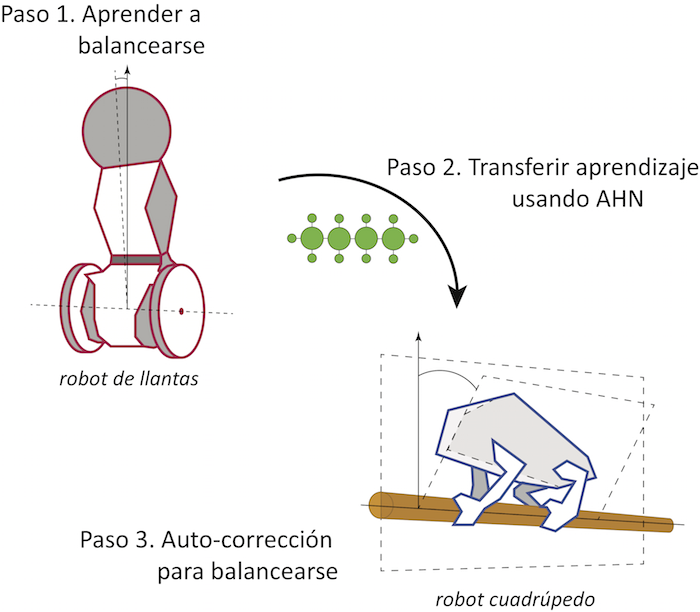
Diagrama del proyecto. Foto: Agencia Conacyt
“Este método está inspirado en la química de los compuestos orgánicos y su intención es simular de manera simple cuáles son los mecanismos químicos por los que los diferentes elementos se van entrelazando y generan cadenas de carbonos. Desde el punto de vista computacional, hacemos esas observaciones y determinamos que al final se pueden utilizar esas moléculas de carbono como paquetes de información”.
Explicó que los paquetes de información operan al dar un conjunto de datos al método y este es capaz de generar pequeños grupos de información a los cuales definen paquetes moleculares, “mismos que, a su vez, comienzan a relacionarse de manera no lineal (…) Al final, lo que se obtiene de esta técnica es un modelo que nos permite generalizar todos esos datos que nosotros le dimos de inicio, es decir, llevamos a cabo un proceso de aprendizaje supervisado”.
De acuerdo con el joven investigador, la intención es que ese mismo método sea utilizado para que los robots sean capaces de transmitir conocimiento entre ellos, que primero aprendan y después sean como maestros que enseñen a otras máquinas lo que aprendieron.
ALCANCES DEL PROYECTO
Por ahora, el objetivo del proyecto será generar transferencia de aprendizaje entre dos robots; la actividad específica será que uno de ellos le enseñe a otro a balancearse por sí mismo, para ello, el primero deberá aprender a hacerlo y, una vez que lo haga, se convertirá en maestro de otro que no posea las mismas características, explicó el investigador.
“Uno de ellos es un robot sobre dos llantas —péndulo invertido desde la óptica de física—, el cual aprenderá primero a balancearse para después transmitir ese conocimiento de cómo se balancea por sí mismo un robot de cuatro patas, pero el reto para este radica en que estará sobre vigas o sobre cuerdas muy tensadas y la idea es que primero aprenda a balancearse por sí mismo en ellas y posteriormente camine”.
De acuerdo con el propio investigador, este proyecto es muy ambicioso porque actualmente no existen los conocimientos analíticos, desde el punto de vista matemático, que digan cómo el robot tiene que balancearse por sí mismo sobre una cuerda, es, en resumen, un problema muy complejo en ingeniería. Sumado a ello, la complejidad se incrementa porque se trata de robots con características diferentes.

El joven doctor Hiram Eredín Ponce Espinosa recibió el Premio Google a la Investigación. Foto: Agencia Conacyt
Al precisar las tareas que se llevarán a cabo a lo largo del año que se contará con el apoyo financiero de Google, dijo que se contempla, en una primera etapa, la construcción del robot de dos ruedas y, posteriormente, dotarlo del conocimiento necesario para llevar a cabo sus tareas. Después de ello, se construirá el robot de cuatro patas para después iniciar pruebas y análisis necesarios para lograr la transferencia de conocimiento.
Finalmente, se realizará la evaluación del proyecto; no obstante, se tiene contemplado dar continuidad al mismo una vez que concluya el año de trabajo con Google para seguir desarrollando la tecnología hasta llevarla a un punto de aplicación y transferencia tecnológica.








